Control Systems Differentiation of parabolic response is a -------------- response? step impulse parabolic ramp step impulse parabolic ramp ANSWER DOWNLOAD EXAMIANS APP
Control Systems The open loop transfer function of a unity feedback control system is given by G(s) = k/s(s+1). If gain k is increased to infinity, then damping ratio will tend to become unity infinite zero 0.707 unity infinite zero 0.707 ANSWER DOWNLOAD EXAMIANS APP
Control Systems The transfer function of the system described by d²/dt²(y(t)) + 3d/dt(y(t)) + 2y(t) = 5u(t) with u(t) as input and y(t) as output is (s²+3s+2)/5 5/(s²+3s+2) s(s²+3s+2)/5 5/s(s²+3s+2) (s²+3s+2)/5 5/(s²+3s+2) s(s²+3s+2)/5 5/s(s²+3s+2) ANSWER DOWNLOAD EXAMIANS APP
Control Systems A second order control system has F(jω) = 100/(100 - ω² + 10√2 jω). Find the resonant peak? 1 0.707 0.5 1.5 1 0.707 0.5 1.5 ANSWER DOWNLOAD EXAMIANS APP
Control Systems What will be the type of the system, if the steady state performance of control system yields a non zero finite value of the velocity error constant? type - 1 type - 3 type - 0 type - 2 type - 1 type - 3 type - 0 type - 2 ANSWER DOWNLOAD EXAMIANS APP
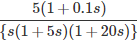
Control Systems The open loop transfer function for unity feedback system is given by Find the steady state error for a ramp input of magnitude 10? 5 infinite 0 2 5 infinite 0 2 ANSWER DOWNLOAD EXAMIANS APP