Control Systems For a lead compensator, the poles lie: on origin. on LHS before zero. on RHS. on LHS. on origin. on LHS before zero. on RHS. on LHS. ANSWER DOWNLOAD EXAMIANS APP
Control Systems A second order control system has a transfer function 16/(s² + 4s + 16). Find the settling time for 2% tolerance? 4 sec 2 sec 10 sec 5 sec 4 sec 2 sec 10 sec 5 sec ANSWER DOWNLOAD EXAMIANS APP
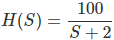
Control Systems The position and velocity error coefficient for the transfer function given below are respectively 0 and infinity. 50 and infinity. 0 and 0. 50 and 0. 0 and infinity. 50 and infinity. 0 and 0. 50 and 0. ANSWER DOWNLOAD EXAMIANS APP
Control Systems To achieve the optimum transient response, the indicating instruments are so designed as to be undamped. provide damping which is slightly less than the critical value. provide damping which is slightly more than the critical value. be critically damped. be undamped. provide damping which is slightly less than the critical value. provide damping which is slightly more than the critical value. be critically damped. ANSWER DOWNLOAD EXAMIANS APP
Control Systems The transfer function for tachometer E(S)/θ(S) is KS2 KS K K/S KS2 KS K K/S ANSWER DOWNLOAD EXAMIANS APP
Control Systems The optimum values of damping ratio is -------------- 0.3 to 0.7 0 to 2 0.3 to 5 0.9 to 1.1 0.3 to 0.7 0 to 2 0.3 to 5 0.9 to 1.1 ANSWER DOWNLOAD EXAMIANS APP